katex: true
tags:
- Vector Search
Highlights¶
约 770 个字 2 张图片 预计阅读时间 4 分钟
- Performing in-depth studies to reveal the root causes of the poor scalability of state-of-the-art vector search algorithms on multi-core architectures
- Introducing intra-query parallelism optimizations, i.e., path-wise parallelism, staged expansion, and redundancy-aware synchronization to accelerate the search.
- Achieving low latency and high accuracy for graph-based algorithms on multi-core architectures.
Solved Problem¶
- ANNs Challenges Analysis: This paper discusses a straightforward parallelism implementation and analyze its cost on multi-core CPUs.
- Proposed Algorithm: The paper presents a new parallel search algorithm that minimizes the search latency to reach a given recall target.
- Present parallel graph algorithms disadvantages: were designed without considering vector-based similarity search and achieving high recall under a stringent latency constraint.
- Present Parallel Graph Framework: Existing frameworks are based on vertex-centric model or its variants (e.g., edge-centric), which cannot provide enough performance benefits, because vector-based similarity search need special data formats for vector index and well-designed parallelism and synchronization mechanisms.
iQAN Algorithm¶
Overview¶
iQAN employs a hybrid parallelism strategy:
-
Global Step (Rough Synchronization): The search progresses in global "steps." At the beginning of each global step, the current set of candidate nodes (in the global priority queue S) is divided among the available T workers.
-
Local Best-First Search (Fine-Grained Parallelism): Each worker then independently performs a best-first search on its assigned subset of candidates, using its own local priority queue LS[t]. This local search continues until a condition is met (e.g., the checker indicates a sync, or the worker runs out of local candidates).
-
Merging: After local searches, all local priority queues are merged back into the global priority queue.
Details¶
This algorithm uses multi entry points, by this way, it can achieve intra-query parallelism. The algorithm is designed to efficiently utilize multiple cores by allowing each core to work on different parts of the search space simultaneously.
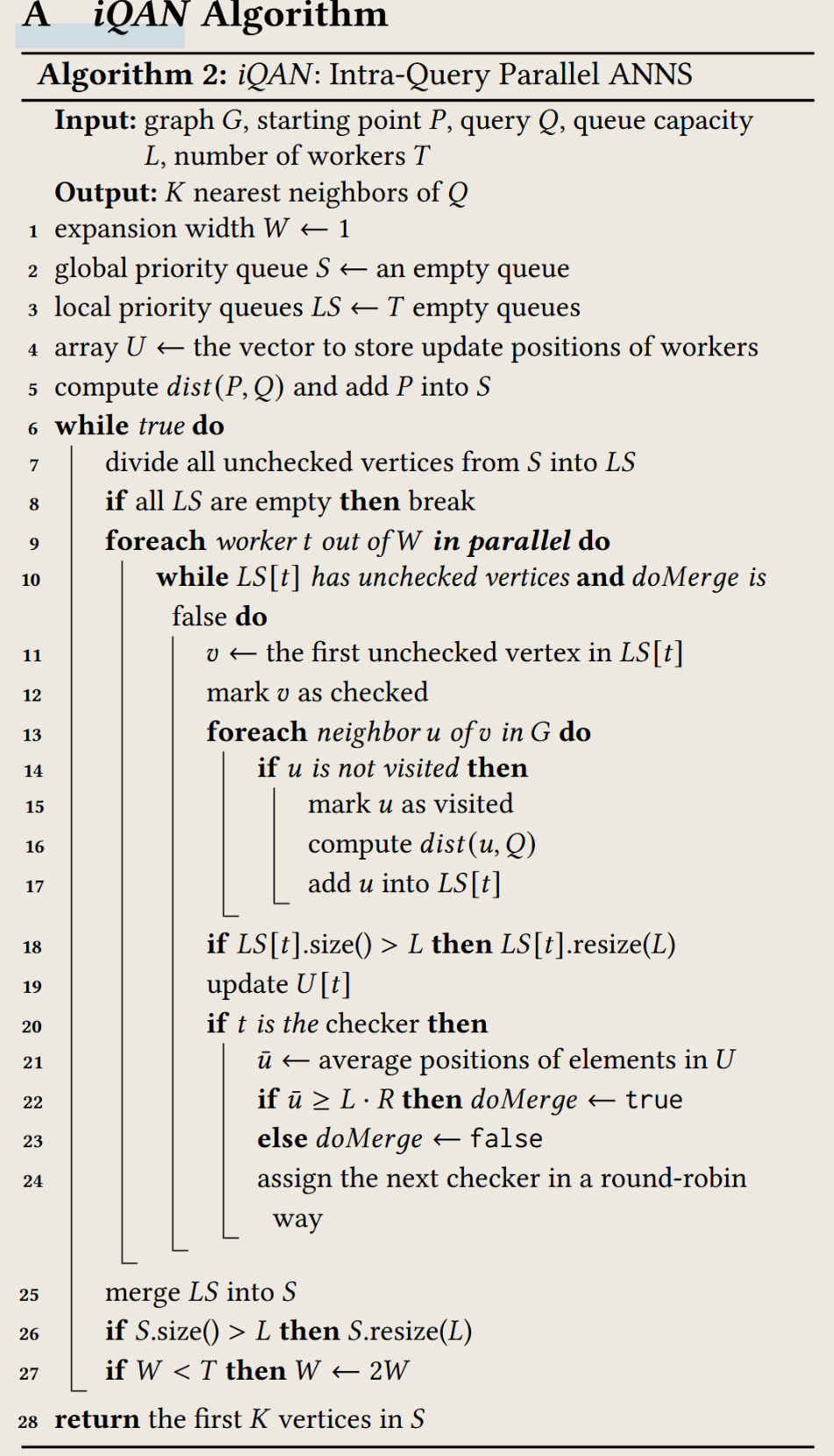
- Divide all unchecked vertices from S into LS: This is the global synchronization step. The candidates currently in the global queue S that haven't been "checked" (expanded) yet are distributed among the T local queues LS[t]. The "unchecked" status is important to avoid redundant work.
- Parallel workers search their local queues LS[t]: Each worker independently performs a best-first search on its local queue LS[t]. This is the local best-first search phase, where each worker explores its assigned candidates without needing to synchronize with others.
- Decide whether to continue or synchronize: The checker(also a worker) computes some average of the workers' update positions \(\overline{u}\).
If the average progress \(\overline{u} \ge L \cdot R\), it means enough work has been done locally, and a global merge should occur. doMerge is set to true to signal this.
The checker role rotates among workers to distribute the overhead (Round-Robin way).
- Merge local queues into global queue S: If the checker indicates that a merge is needed, all local queues LS[t] are merged back into the global queue S. This is the global merge step.
- Stop: Once the while true loop breaks (meaning no more unchecked candidates globally), the algorithm returns the top K nearest neighbors from the final global priority queue S.
Comparison with \(\Delta-stepping\)¶
The idea of reducing synchronization overhead is from GraphIt, the algorithm is below:

The synchronization of GraphIt is updating buckets, whose element type is int64_t and size is 8 bytes, while iQAN's synchronization is updating bit vector, whose element type size is 1 bit. So \(\Delta-stepping\)'s synchronization overhead is much larger than iQAN's.
My Thoughts¶
- Path-Wise Parallelism: Searching through just one entry point is wasting the potential of multi-core CPUs. iQAN's path-wise parallelism allows multiple workers to explore different paths simultaneously, significantly improving search efficiency.
This idea is from parallel expansion for DFS/BFS.
- Staged Expansion: PP parallelism will increase addtional distance computation overhead, so iQAN increases the number of searching paths every t steps.
I think this idea is like TCP Congestion Control, from 1 to 2, 4, 8, ..., until a threshold, it is a exponential growth.
- The AUP(Average Update Position) is crucial, it is a trade-off between the synchronization overhead and the search latency. This idea is similiar to the size of local bucket in \(\Delta-stepping\).