DFlash : Block Diffusion for Flash Speculative Decoding¶
约 2595 个字 4 张图片 预计阅读时间 13 分钟
什么是 DLLM?¶
在标准的自回归语言模型中,序列的联合概率分布被严格分解为条件概率的连乘:$\(p(x_1,\dots,x_n)=\prod_{i=1}^n p(x_i\mid x_{<i})\)$直观含义:第 \(i\) 个 Token 只能基于它前面的 \(i-1\) 个 Token 来预测。
dLLM 抛弃了上述的单向连乘约束,转而借鉴了 Diffusion 模型在图像生成领域的成功经验,定义了一个加噪与去噪”的过程:
- Forward Process (前向加噪):在训练阶段,拿一段干净的原始文本(Clean Sequence),将其中的一部分 Token 随机替换为 [MASK] 标记。
- Reverse Process (反向去噪):模型不去学习下一个词是什”,而是学习在当前这个部分可见、部分被 Mask 的序列状态下,每个 Mask 位置最原本的 Token 是什么。
- 此时,模型建模的目标变成了条件分布:$\(p(x_{masked} \mid x_{observed})\)$
具体有如下两个核心流程:
1. Block Diffusion (块状并行预测)
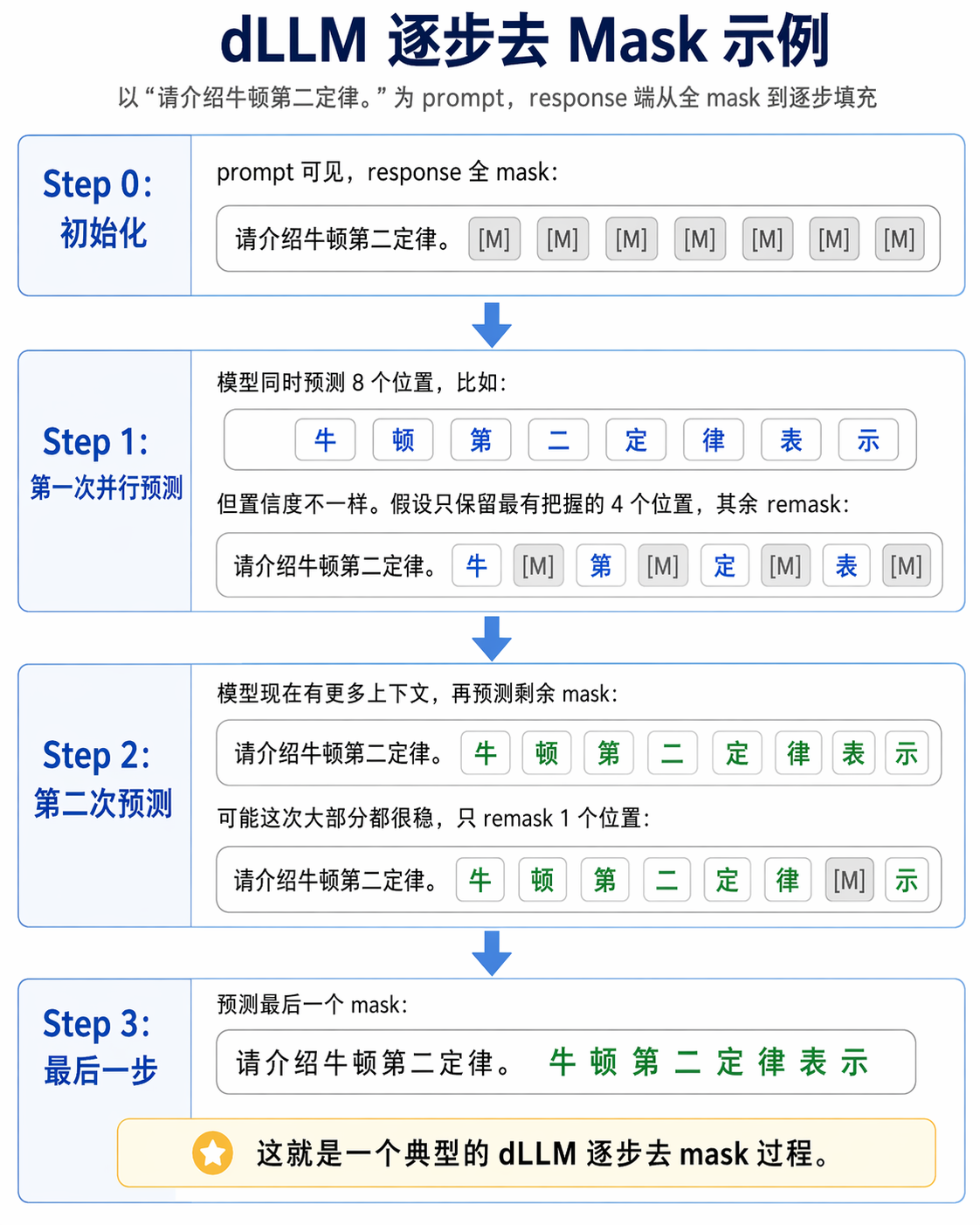
- 在推理的初始状态,整个序列(或一个 Block)可能完全是 [MASK]。模型进行一次前向计算(Forward Pass),就会同时对这个 Block 内所有被 Mask 的位置给出预测概率。
- Block 内是双向注意力,Block 间是因果注意力,可以复用 LLM 推理中的 KV Cache 机制。
- Remask (动态重掩码与迭代细化)
- 如果一次性把所有 Mask 预测出来直接作为最终结果,质量通常会很差,因为全 Mask 状态下缺乏上下文信息(类似图像扩散中直接一步从纯噪声跨越到清晰图像)因此,dLLM 引入了 Remask 机制,形成迭代循环:- Step 1: 并行预测。基于当前的 Mask 状态,模型预测出所有 [MASK] 位置的候选 Token 及其置信度。
- Step 2: 择优保留。在所有预测出的 Token 中,系统只接受那些置信度最高、最确定的一小部分 Token(相当于将这些位置从 [MASK] 更新为真实的 Token)。
- Step 3: 重新掩盖 (Remask)。将其余置信度不高的位置重新打上 [MASK] 标记。
- Step 4: 循环迭代。带着刚才已经接受的 Token,进入下一轮预测。因为有了更多确定的上下文,下一轮对剩余 [MASK] 的预测会更加准确。
Diffusion Drafter (DFlash) 相较于 AR Drafter 的本质加速优势¶
在每一轮投机解码中,平均生成单个 Token 的延迟 \(L\) 定义如下:$\(L = \frac{T_{draft}+T_{verify}}{\tau}\)$
- \(T_{draft}\):Draft 模型生成候选 Token 序列(Proposal)所花费的时间代价。
- \(T_{verify}\):Target 模型并行验证这些候选 Token 所花费的时间。
- \(\tau\):单轮最终实际推进的 Token 数量。
若 Draft 提议了 \(\gamma\) 个 Token,则 \(\tau \in [1,\gamma+1]\)(包含 Target 自身附赠的 1 个 Bonus Token)。
加速的唯二路径:
- 增大分母(提升 \(\tau\)):让 Target 模型每轮接受更多的 Token(即猜得更准、更长)。
- 减小分子(降低 \(T_{draft}\) 或 \(T_{verify}\)):在保证质量的前提下,极力压缩 Draft 和 Verify 的时间成本。
因此,投机解码的终极加速比(Speedup) \(\eta\) 为:$\(\eta = \frac{L_{target}}{L}\)$
AR Drafter¶
AR Drafter 的核心痛点在于串行生成的成本随着预测长度线性膨胀。其 Draft 时间成本模型为:$\(T_{draft} = \gamma \cdot t_{step}\)$
- 想增大预测长度 \(\gamma\)(试图提高分母 \(\tau\)),就必须串行执行更多次 Forward,\(T_{draft}\) 随之线性飙升。
- 为了控制 \(T_{draft}\) 不至于爆炸,AR Drafter 被迫设计得极浅、极轻(例如 EAGLE-3 常用的单层 Transformer)。
- 接受长度(\(\tau\))迅速饱和:模型太浅导致表达能力羸弱,越往后的 Token 猜测准确率越低。
Diffusion Drafter (DFlash)¶
Diffusion Drafter 时间成本模型变为:$\(T_{draft} \approx t_{parallel}\)$
由于它采用 Block-parallel prediction(即一个 Block 内的 \(\gamma\) 个位置同时预测),只要在现代 GPU 的合理 Block Size 内,Draft 成本对 \(\gamma\) 的增加极不敏感。
- Diffusion Drafter 可以承担更深、更具表达能力的架构。
- 更深的模型带来了质的飞跃,候选 Token 的准确率大幅上升,使得 \(\tau\) 能够持续增长,而不会像浅层 AR 模型那样迅速饱和。
Dllm Drafter¶
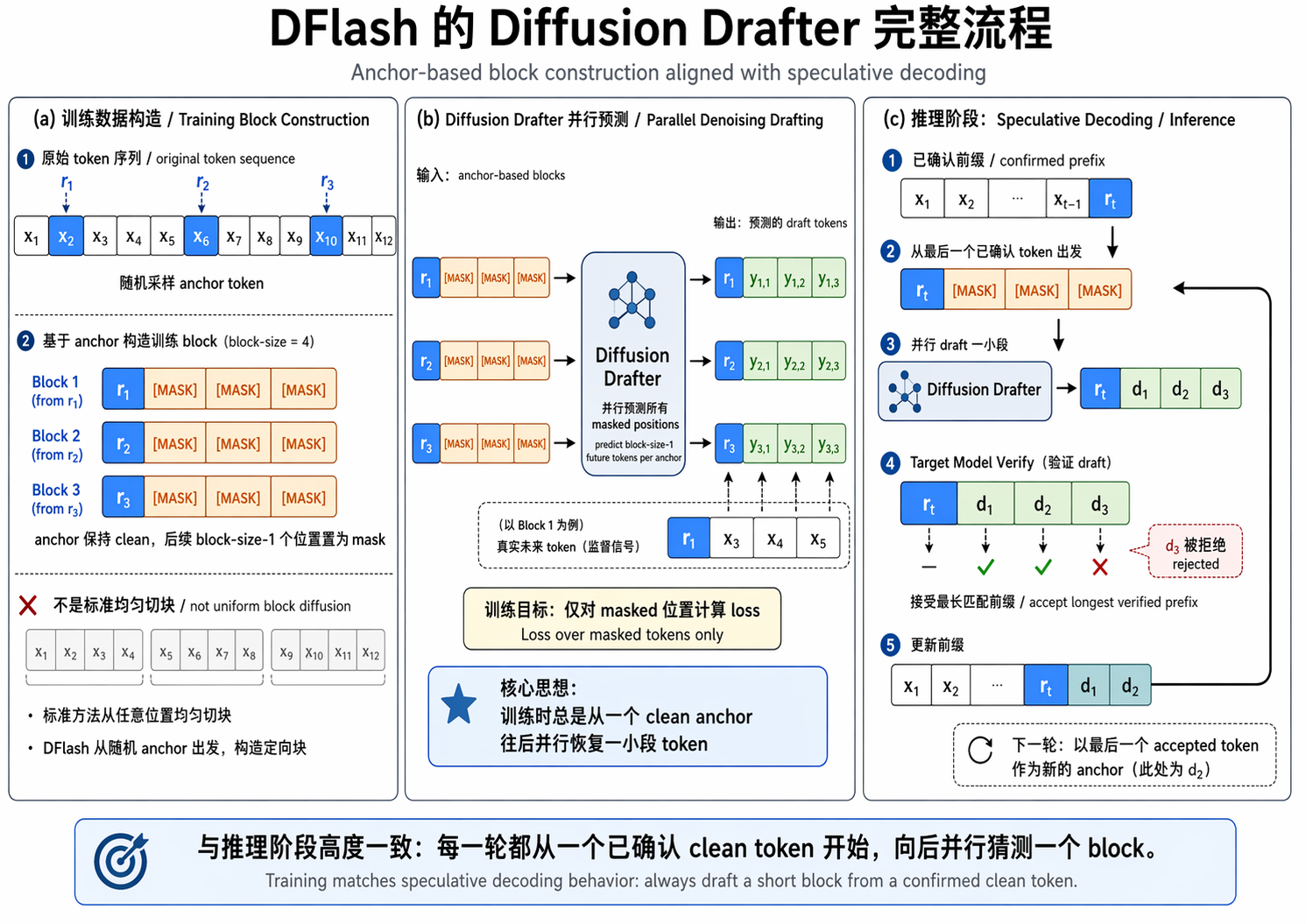
不是 dllm 使用的 block diffusion 的均匀切块,而是随机采 anchor,把 anchor 作为块的第一个位置,mask 后面所有位置,让模型并行预测后续 block-size-1 个 token。这样和推理阶段总是从一个已确认 token 往后 draft 的行为一致
Note
在推测解码中,并非所有令牌都是相等的。草稿块中早期位置的错误会使所有后续令牌无效。这使得早期预测对于接受长度显得尤为重要。我们通过对交叉熵损失进行加权来反映这种不对称性,以强调训练期间早期的标记位置;使用权重衰减来实现
- 更大的 block size 效果更好,用更大 block size 训练的模型可以使用更小的 block size 进行推理,但反过来不行。
DFlash Inference Workflow¶
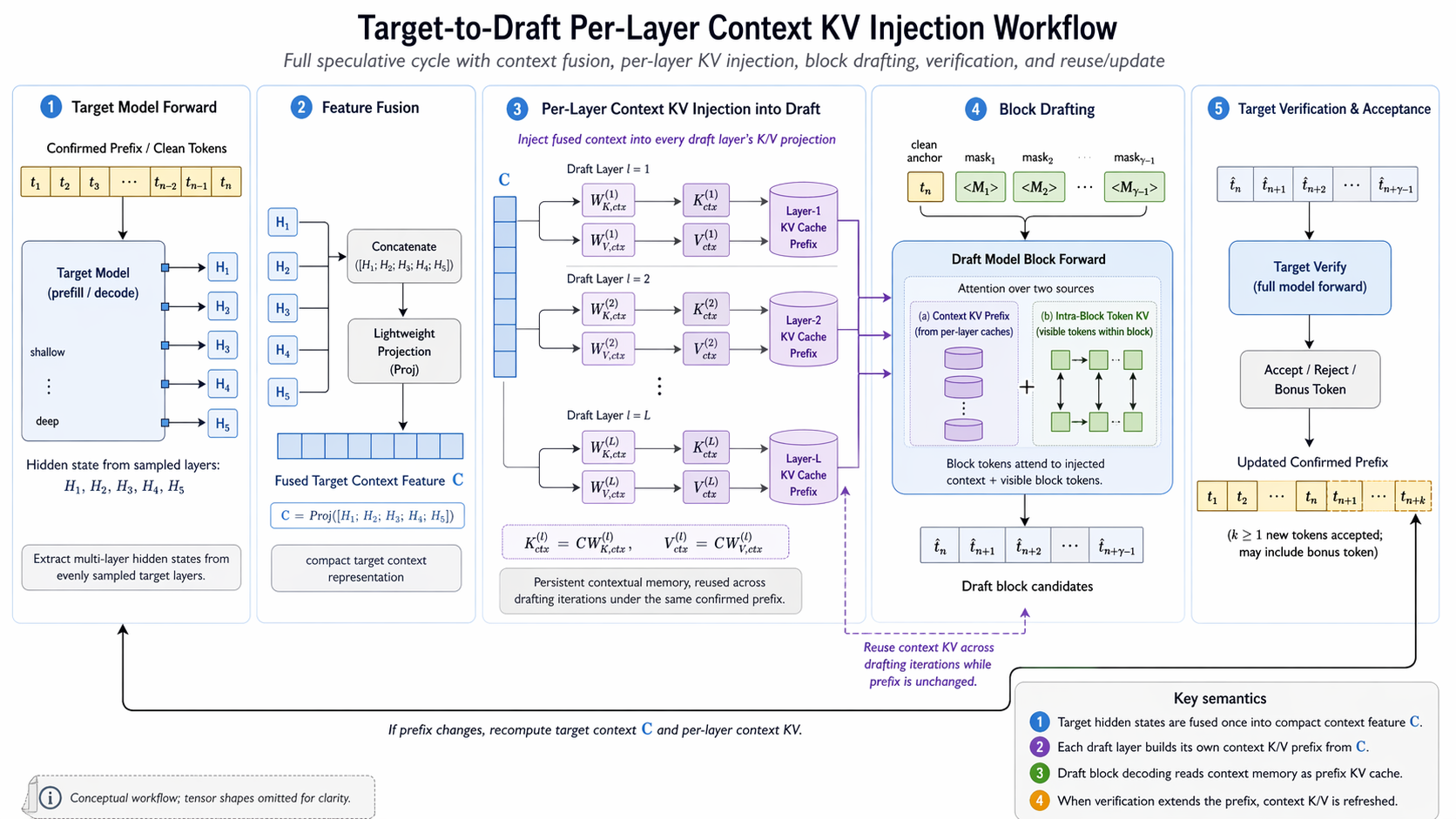
- Step 1:目标模型先正常 prefill,一边算首 token,一边抽 hidden feature
- Step 2:把多层 hidden feature 融合成一个 target context feature
- Step 3:把这份 context feature 注入 draft 每一层的 KV cache
- Step 4:draft model 以一个 clean token + 一串 mask token 为输入,并行预测下一整个 block
- Step 5:target model 对整个 draft block 做并行 verify
- Step 6:更新状态,进入下一轮
数学证明(AI 辅助)¶
为什么 AR drafting 容易 error accumulation,而 block diffusion(尤其在 DFlash 这种强条件化 target hidden features 的设置下)能显著缓解。
- 记号与 acceptance length 的基本公式
设一次 speculative 迭代要生成一个长度为 B 的块:
- 目标模型(target)在给定前缀上下文 c(可理解为 prefix + target hidden state)下的逐步条件分布:
$\(p_i(\cdot) \;=\; p\big(x_{t+i}\mid c, x_{t+1:t+i-1}\big)\)$
- draft 生成的候选块记为 \(\hat x_{1:B}\),target 在 verify 阶段得到参考 token 序列 \(x^\star_{1:B}\)
- 定义接受长度
$\(\tau \;=\; \max\{k: \hat x_{1:k}=x^\star_{1:k}\}\)$
- 一个常用恒等式(离散非负整数随机变量):
- τ≥k 的含义是至少接受了前 k 个 token
- 这等价于前 k 个 token 都匹配,也就是 \(\hat x_{1:k}=x^\star_{1:k}\)
$\(\mathbb{E}[\tau] \;=\; \sum_{k=1}^{B}\mathbb{P}(\tau\ge k) \;=\;\sum_{k=1}^{B}\mathbb{P}(\hat x_{1:k}=x^\star_{1:k})\)$
并且
$\(\mathbb{P}(\hat x_{1:k}=x^\star_{1:k}) = \prod_{i=1}^{k} \mathbb{P}\Big(\hat x_i=x^\star_i \,\big|\, \hat x_{1:i-1}=x^\star_{1:i-1}\Big)\)$
所以长前缀能否被接受,取决于每一位的命中概率是否会随着 i 快速变差。
- 如果概率快速变差,乘积会快速衰减,导致大 k 的概率很小,\(\mathbb{E}[\tau]\)就小。
- 为什么 AR drafting 会产生 error accumulation:隐藏状态误差的递推放大
AR draft 的核心结构是链式条件化:
$\(q(\hat x_{1:B}\mid c)=\prod_{i=1}^{B} q\big(\hat x_i \mid c, \hat x_{1:i-1}\big)\)$
draft 在每一步用的是自己的隐状态 \(\tilde h_i\),它由 draft 的动力学递推得到;一旦前面有偏差,这个偏差会通过递推影响后续全部步骤。
目标 vs draft 的隐状态演化
把 transformer 的状态更新抽象成一个状态递推(这在理论分析里很常见):
- target 的状态:
$\(h_i = F(h_{i-1}, x^\star_i), \quad h_0 = H(c)\)$
- draft 的状态:
$\(\tilde h_i = \tilde F(\tilde h_{i-1}, \hat x_i), \quad \tilde h_0 = \tilde H(c)\)$
- 经过一系列推导和约束,我们可以得到偏差的下界 \(\delta_i\)
$\(\delta_i \le L^i\delta_0 + \varepsilon\sum_{j=0}^{i-1}L^j = L^i\delta_0 + \varepsilon\frac{L^i-1}{L-1}\)$
- 结论 1(累积放大):如果 \(L\ge 1\),则\(\delta_i\) 随 i 呈指数/几何增长趋势(至少不小于线性增长),这就是 AR drafting 的 error accumulation 的数学原型:前面的一点点状态偏差,会在链式递推中被反复放大。
- 隐状态误差如何导致命中概率随位置变差
- 再考虑 draft 与 target 之间还存在“头/表示”偏差(如果不复用 head/embedding,这个偏差更大)。最终可写成
$\(d\big(q_i(\cdot), p_i(\cdot)\big) \;\le\; \underbrace{C\,\delta_{i-1}}_{\text{链式累积项}} +\underbrace{\eta}_{\text{静态偏差项(结构/头部不一致)}}\)$
- 而命中概率至少会随着分布差增大而下降。比如设 \(x^\star_i\) 是从 \(p_i\) 采样或 greedy,保守地可以用 TV 给出:
TV(Total Variation distance 全变差距离),用来衡量两个概率分布差得有多可区分,KL 小,TV 必然小
$\(\mathbb{P}(\hat x_i = x^\star_i \mid \text{prefix match}) \;\le\; p_i(x^\star_i) + d_{\text{TV}}(q_i,p_i)\)$
- 结论 2(命中概率随位置恶化):在 AR draft 中,\(d(q_i,p_i)\ \text{包含}\ C\delta_{i-1}\),而 \(\delta_{i-1}\) 由 \(\delta_i \le L\delta_{i-1}+\varepsilon\) 递推增长,因此随着 i 增大,后面 token 的命中概率会系统性下降,导致
\(\mathbb{P}(\tau\ge k)=\prod_{i=1}^{k}\text{(命中概率}_i\text{)}\)
出现更快的指数衰减(这就是接受长度更短的数学原因)。
- 为什么 block diffusion 能缓解:生成整个块时,每个位置的预测不需要依赖前一个尚未验证 token 形成的递推状态,而是依赖一个共享的强条件 \(\mathbb{P}(\tau\ge k)=\prod_{i=1}^{k}\text{(命中概率}_i\text{)}\)
出现更快的指数衰减(这就是接受长度更短的数学原因)。
$\(q(\hat x_{1:B}\mid c) = \int q(\hat x_{1:B}\mid z,c)\,\pi(z)\,dz\)$
- \(z\) 是 diffusion 中的随机噪声变量
- 每个位置 i 的 logits 近似看作 \(\hat \ell_i = \phi_i(c, z, \text{(block interaction)})\)
- 重点是:不存在\(\tilde h_i = \tilde F(\tilde h_{i-1}, \hat x_i)\) 这种沿 i 方向的强递推依赖。
于是分布偏差的上界变成:
$\(d\big(q^{\text{BD}}_i(\cdot), p_i(\cdot)\big) \;\le\; \underbrace{\eta'}_{\text{静态偏差(可通过复用 head/embedding 降低)}} +\underbrace{\text{(interaction error)}}_{\text{与 denoise steps 有关,但不随 }i\text{几何放大}}\)$
也就是说,AR 的误差界里会递推放大;block diffusion 的误差界里通常没有这种按位置递推放大的项(它可能随 denoising step 收敛,但不会沿 token index i 级联爆炸)。
- 因此对同样的块长 B,block diffusion 更容易得到更大的 \(\mathbb{E}[\tau]\)。