Parallelism in Transformer-Based LLM
- DP: LLM 训练常结合 ZeRO 使用,减少 optimizer/gradient/weight 的冗余。
- PP: DeepSeek 使用了 Dualpipe,大多数都会使用 1F1B
- TP: Megaton-LM 的 attention 算子并行和 matmul 并行
- Expert Parallelism: MoE 层的专家并行,GShard-MoE
- :laughing:Inference 越来越常见
- SP(Sequence Parallelism)/CP(context parallelism): 超长上下文 LLM 训练使用
接下来我们将以 Transformer-based LLM 为例,分析 Attention 和 FFN or MoE 采用的并行化手段(Training & Inference)
MLP Parallelism
MLP 的并行运算,包括层内切分、层间切分以及参数冗余消除,并行方式包括了数据并行(DP)、序列并行(SP)、张量并行(TP)、层并行(PP)、参数冗余消除(Zero)
层内并行
- DP: batch size 切分
- SP: seq len 切分
- TP: hidden size 切分 $$ activation size:[batch_size, seq_len, hidden_size]$$
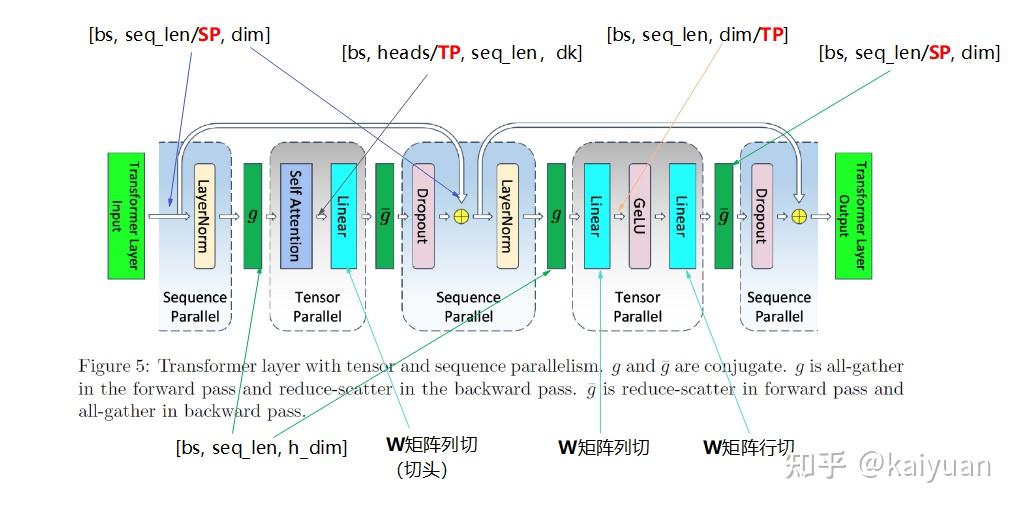
SP 和 TP 通常一起使用,因为 TP 仅仅切分了 weights,而 input 没有切分,GPU 上仍然保存完整的 输入计算的 activation,而 SP 则切分了 activation
- 对于 MLP 来说,SP 是比较容易的,
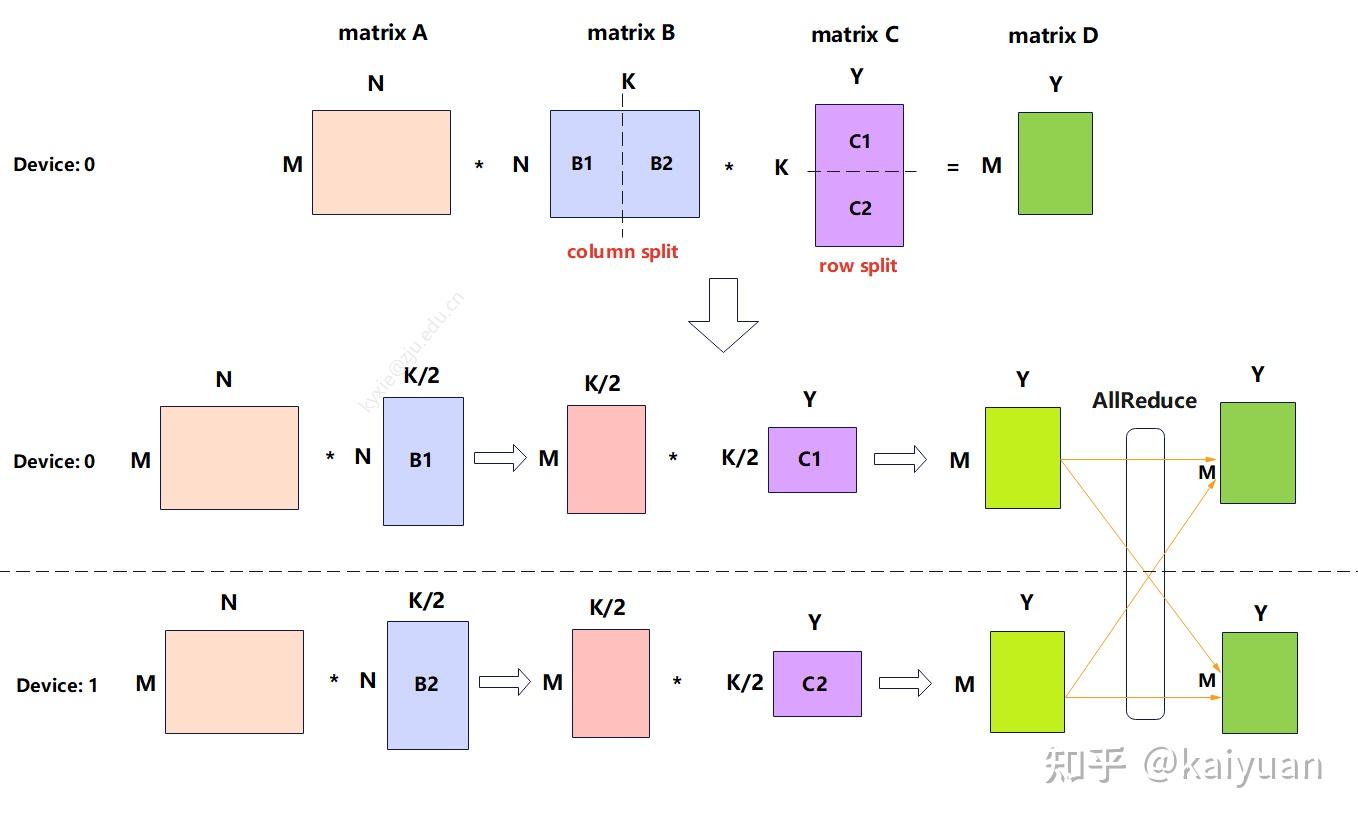
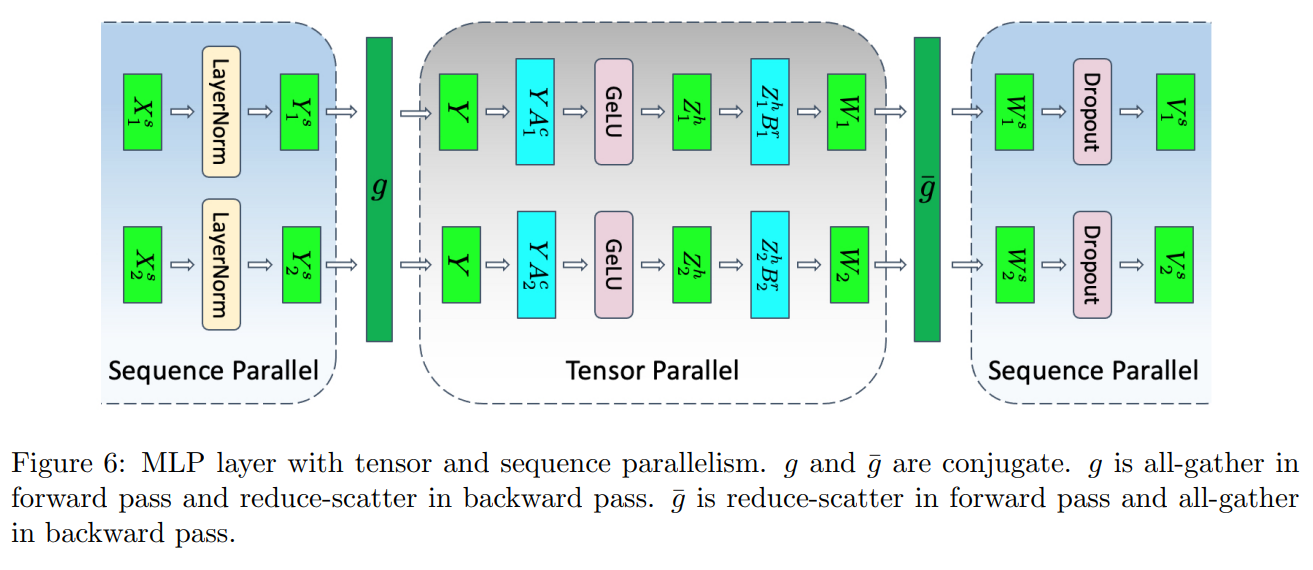
Example megatron-v3 中使用 SP+TP 来减小 activation 的大小1,TP 的计算过程类似 MatMul Parallelism 的描述
-
MLP TP 在 A x B x C 矩阵乘法场景,B 矩阵列切, C 矩阵行切。计算量减半,多了一次集群通信(allReduce)中间值的存储大小减半,Input, Weight 减半
-
因为 GeLU 非线性,必须使用 allGather 来收集 activation1
层间并行
Pipeline Parallelism,Expert Parallelism,Attention-FFN Decoupling
现在的普遍做法是 AFD(Attention-FFN Decoupling),这是一种层间异构并行策略,把 Transformer 里的 Attention 和 MoE-FFN 拆开到不同设备上执行,以适配它们算力/显存需求的差异,从而提高推理吞吐和硬件利用率,MoE 的不同专家也分配到不同的 GPU 上23
-
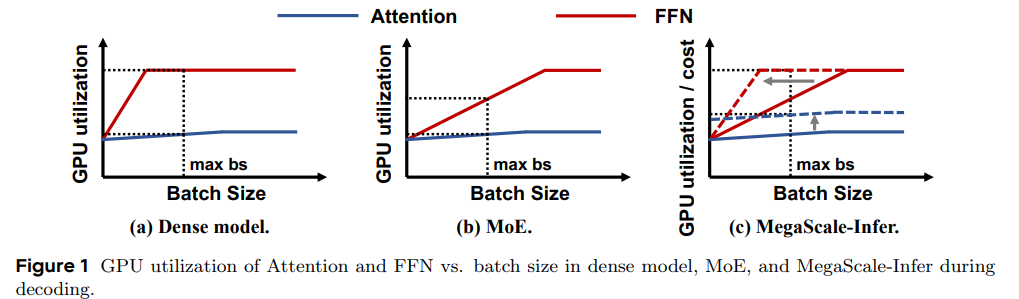
Attention 是 Matmul + softmax + activation,通常是访存瓶颈(memory access bound)
-
FFN 是占用显存大,算力要求高,通常表现为计算瓶颈(compute bound)
-
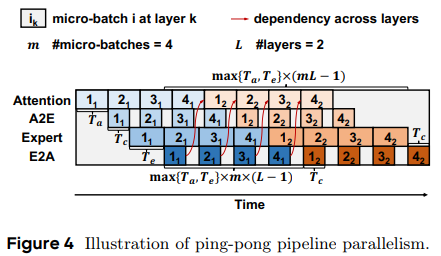
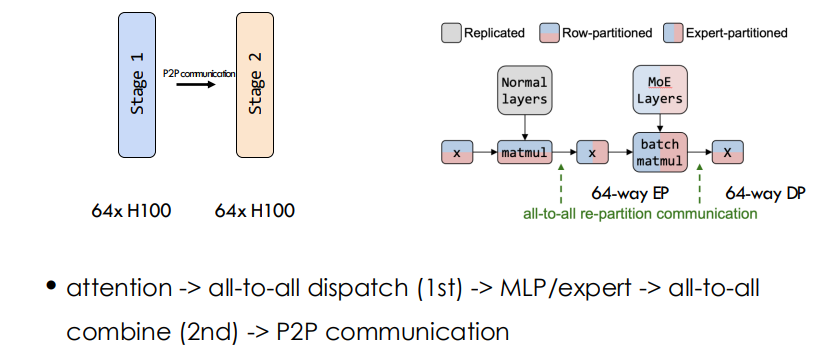
ByteDance 的 AFD 方案 overview
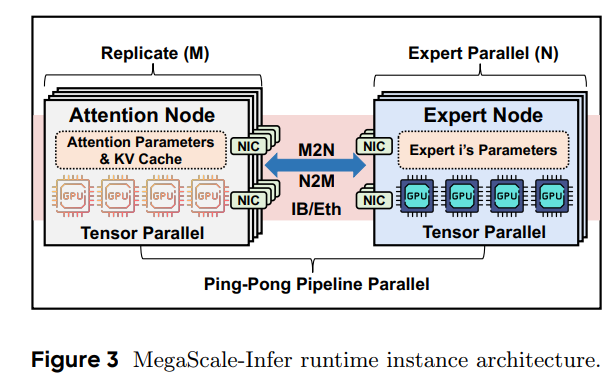
- 将一批请求拆分成 m 个微批次 (micro-batches),在注意力节点和专家节点之间创建一个“乒乓流水线”。这些节点执行微批次的前向传播,并在每个 MoE 层中交换两次中间结果。这种设置使得前向计算能够覆盖通信开销
冗余参数消除
一般使用 ZeRO,将参数分散存储
-
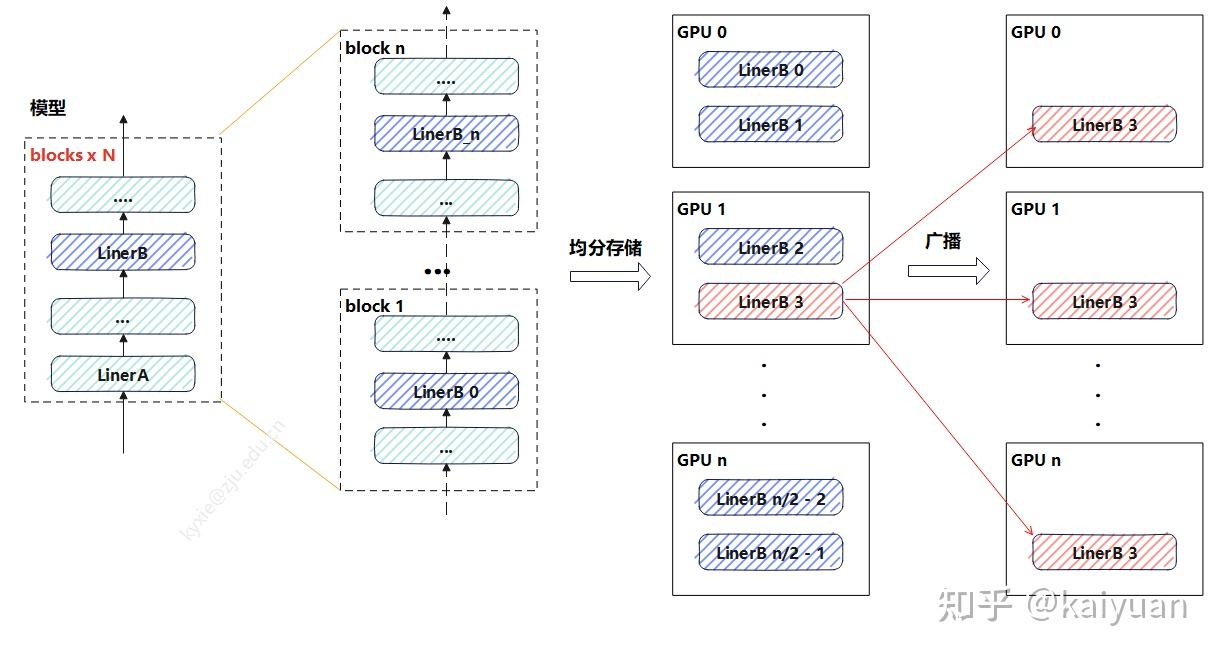
模型参数较小时,一般选择参数广播
-
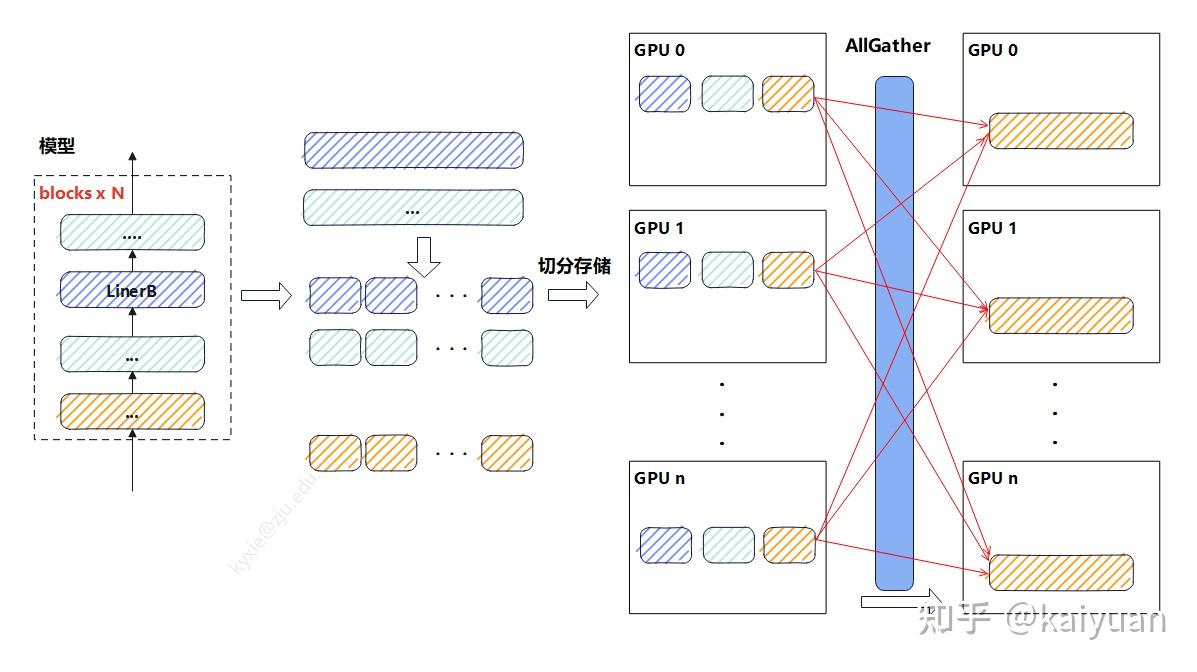
参数较大时,将每一层的权重 n 等分,每个 GPU 设备上面存一份,当需计算时将其 allgather 回来。
Attention Parallelism
- DP: batch size
- TP: heads & $d_k$
- SP/CP(context parallelism): seq_len $$attention \space size: [batch_size, heads, seq_len, d_k]$$
Attention 的层间并行、冗余参数消除方式与线性层的方式一致,层内并行的主要差异是 TP 和 SP
Sequence Parallelsim45
Motivation
self-attention 的内存需求是输入长度(sequence length)的 2 次方。其复杂度为 \(O(n^2)\) ,其中,n 是序列长度。换言之,长序列数据将增加中间 activation 内存使用量,从而限制设备的训练能力。
这里出现了三种切分方式:
- 只切分 Q 的序列
Q 的切分后的尺寸为\([bs, heads, seq_len/SP, head_dim]\),按照 attention 计算:
- 求解 score,Q x K 相当于左矩阵行切,score 尺寸:\([bs, heads, seq_len/SP, seq_len]\)
- softmax 求解的是最后一个维度,计算元素值相同,得到 attention_weights,
- attention_weights 与 V 进行矩阵乘,还是左矩阵行切运算,元素值相同,计算得到 O 的分块结果
- 将计算的 O 进行 allgather,结果相等。
:warning: 虽然计算上可行,但每个 GPU 都需要一份完整的 K 和 V,没有节省下长序列带来的巨大 KV Cache 内存开销,这违背了 SP 的初衷。
- 只切分 K 的序列 score 尺寸是\([bs, heads, seq_len, seq_len/SP]\),进一步计算 softmax,由于最后一个维度的数据只有之前的一半长度,而 softmax 的计算跟整个序列相关,直接拼接会导致结果不相等。所以,单独切 K 序列后拼接,结果不等
- 只切分 V 序列 得到 attention_weights 尺寸完整,计算 attention_weights x V,因为 V 矩阵被行切,所以 attention_weights 需要列切(Matmul parallelism 的图),最后 allreduce 能够获得完整结果
:warning: softmax 计算需要完整的 score 矩阵,内存瓶颈没有解决
当前常用的方式:QKV 按照相同方式切分,然后对 softmax 修正:
- 数据协同切分:每个切分 Qi 要与所有的 Ki、Vi 进行一次计算,得到 Oi,尺寸均为$[bs, heads, seq_len/N, head_dim]$,$N$是 sp 的并行度
- 分块计算与通信:每个$Rank_i$ 的目标是计算出它所负责的输出 $O_i$。要计算 $O_i$,$Q_i$ 必须和所有的 $K_j$ 与 $V_j$(其中 $j=0, 1, ..., N-1$)进行交互。这通过通信实现(例如,All-to-All 或者 Ring AllGather)。
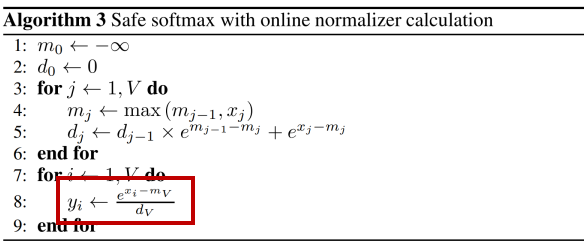
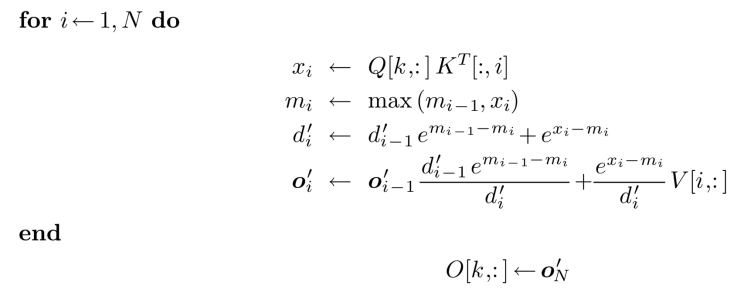
- 在线 Softmax 修正:在与每个 $K_j$, $V_j$ 块交互计算时,不能直接计算局部的 softmax 然后相加。必须使用一种Online 的算法来迭代地更新 softmax 的结果,从而保证最终结果与全局计算完全一致。
prefill
推理的 prefill 阶段,Q 的序列长度与 KV 保持一致,开启 SP 后 GPU 之间需要交换 KV 值与 Q 进行运算
-
每个 rank 的 Q 与 KV 匹配计算完后获得三个输出值,然后进行结果修正得到$[O_{X0}, O_{X1}, O_{X2}]$,X 值为 rank 序号。最后每个 rank 将自己的分块结果进行聚合(加法)运算得到结果 $O_X$6
可以选择 pass Q 或者 pass KV
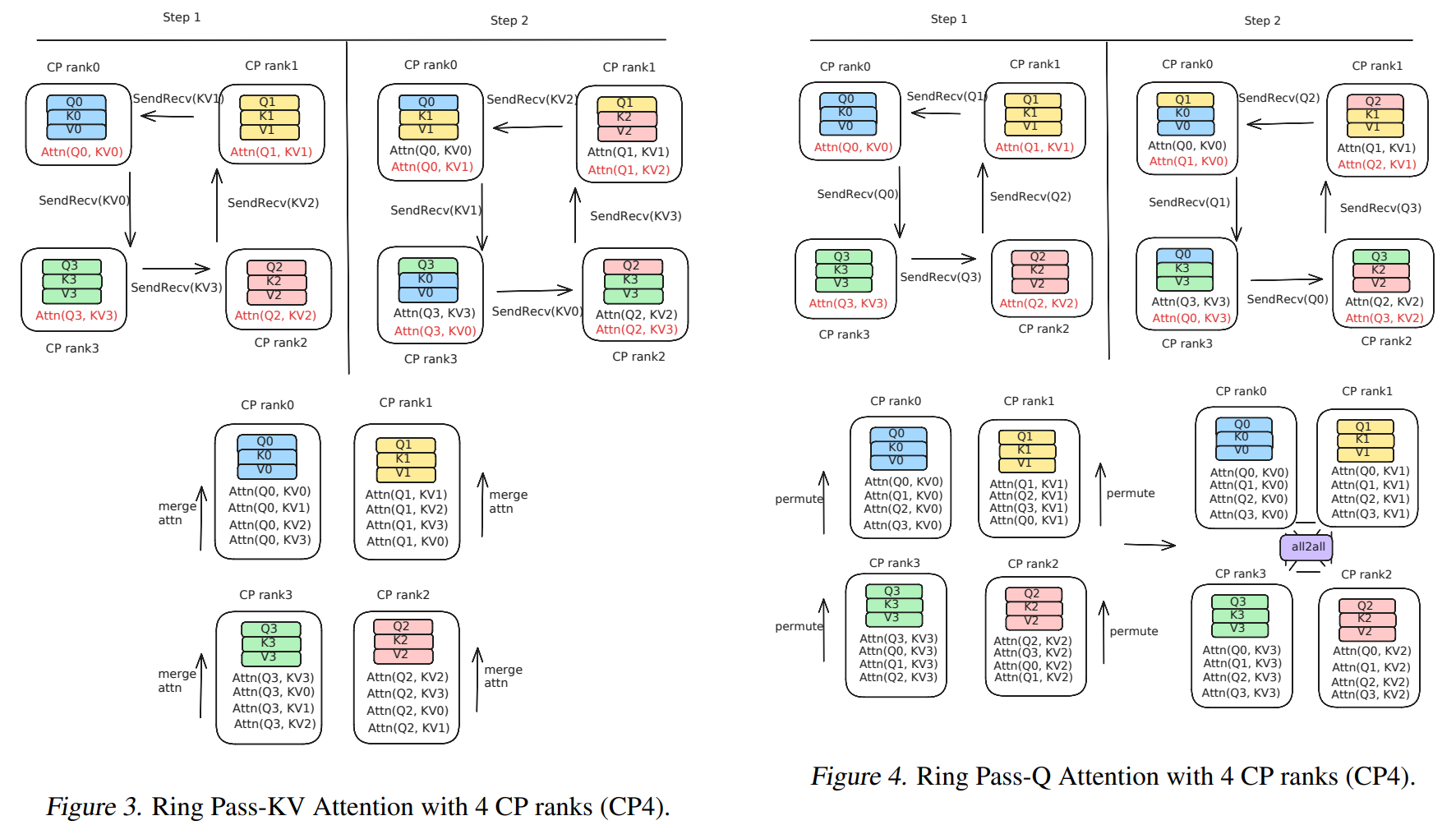
类似分布式的 flash attention7
decode
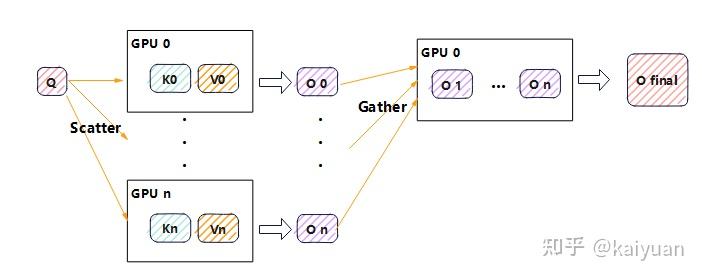
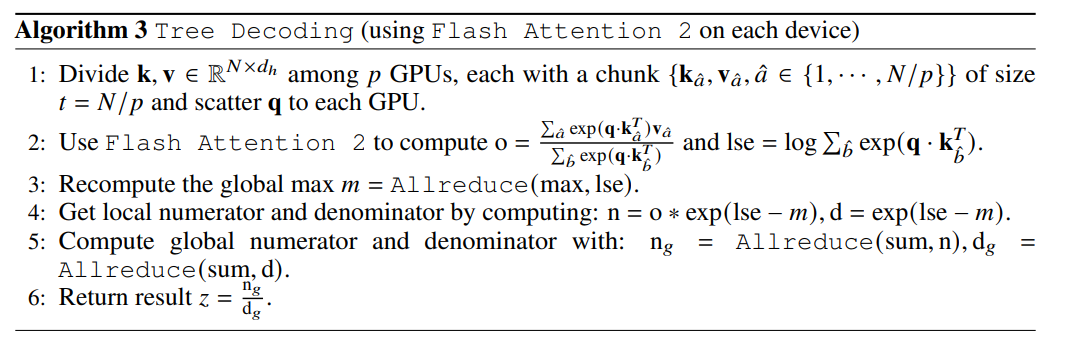
在 decode 阶段 Q 的长度为 1,若对应的 KV 值分散在各个 GPU 设备中,可以将 Q 复制 N 份与切片的 KV 值进行 attention 计算后,最后将结果 gather 到一个设备上再计算修正结果。
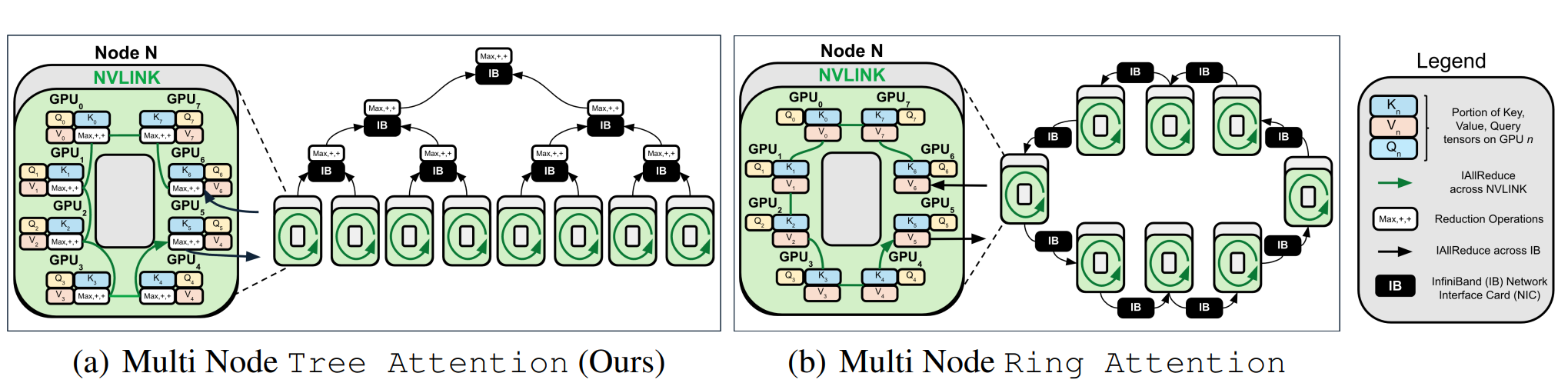
- 这个方式意味着 GPU0 需要完成最大值、修正运算、求和运算,GPU0 可能成为瓶颈。一种 Tree attention 算法对过程做了改进,提升了通信效率。就是把 gather 换成多次 allreduce,这种方式在跨节点场景中优势明显8。
Tensor Parallelism
Attention 的张量并行分为两个部分:QKV 运算、线性投影运算。
QKV 运算的 TP 切分一般针对 heads 维度,相当于矩阵的并行的批量运算1
- attention 按照 heads 进行切分
- linear 按照 hidden_size / heads 进行切分
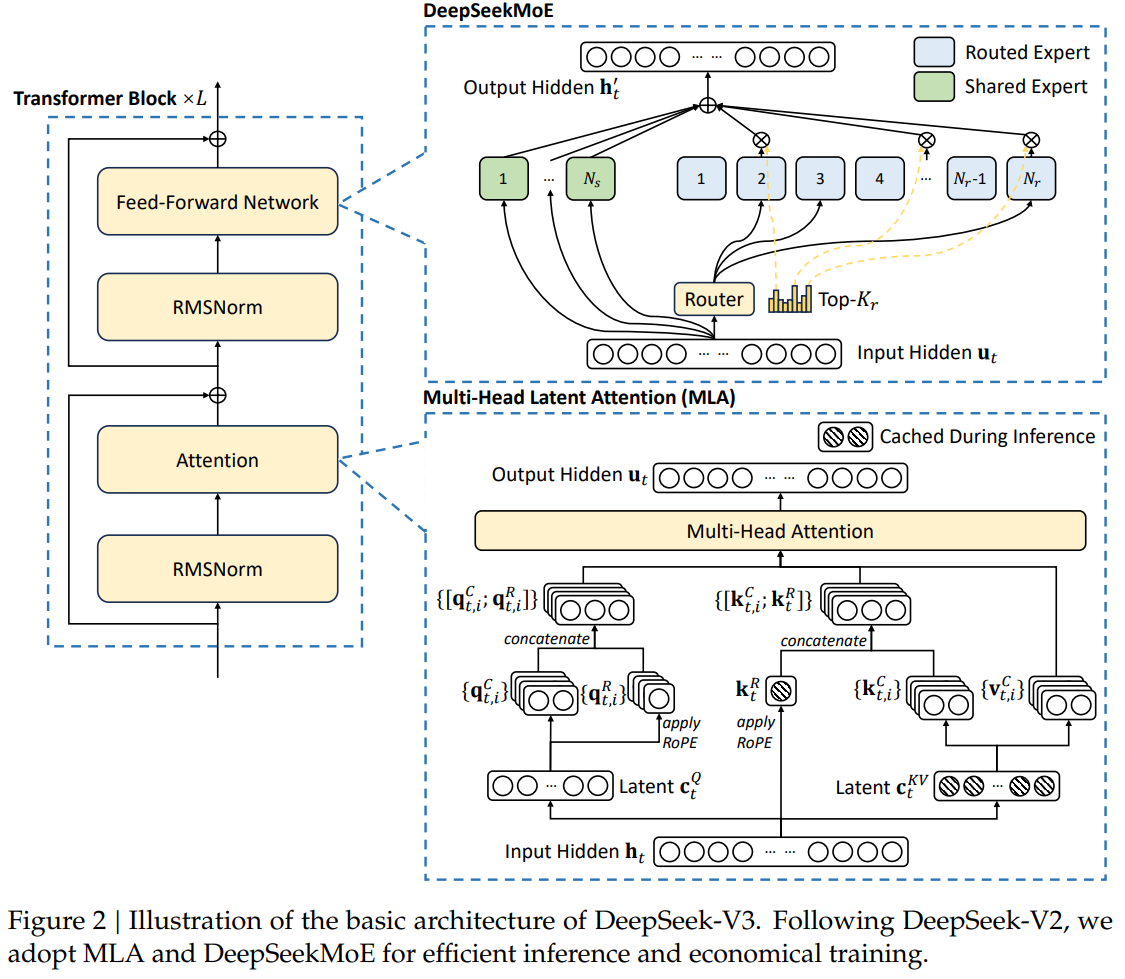
DeepSeek-V39
DeepSeek 一共有 61 层,但并非每层都采用 MoE 结构,前 3 层依然是只有 1 个 MLP 的 Dense 层
Training Parallelism
\(16PP \times 64EP \times 2DP(ZeRO) = 2048\) GPUs
-
DualPipe with Overlap
- 可以让 compute 和 communication 重叠,在整个双向管道都充满数据的情况下
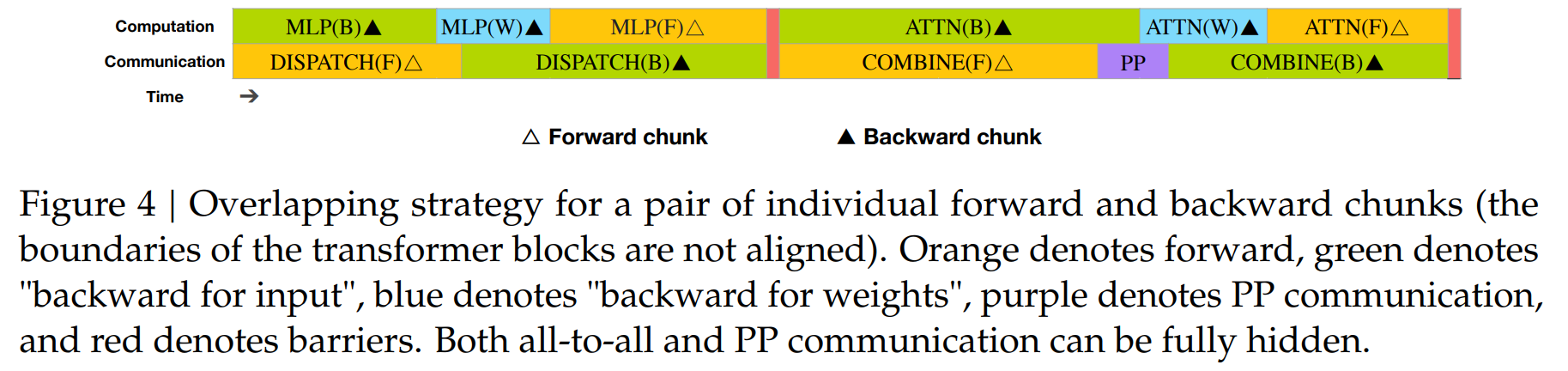
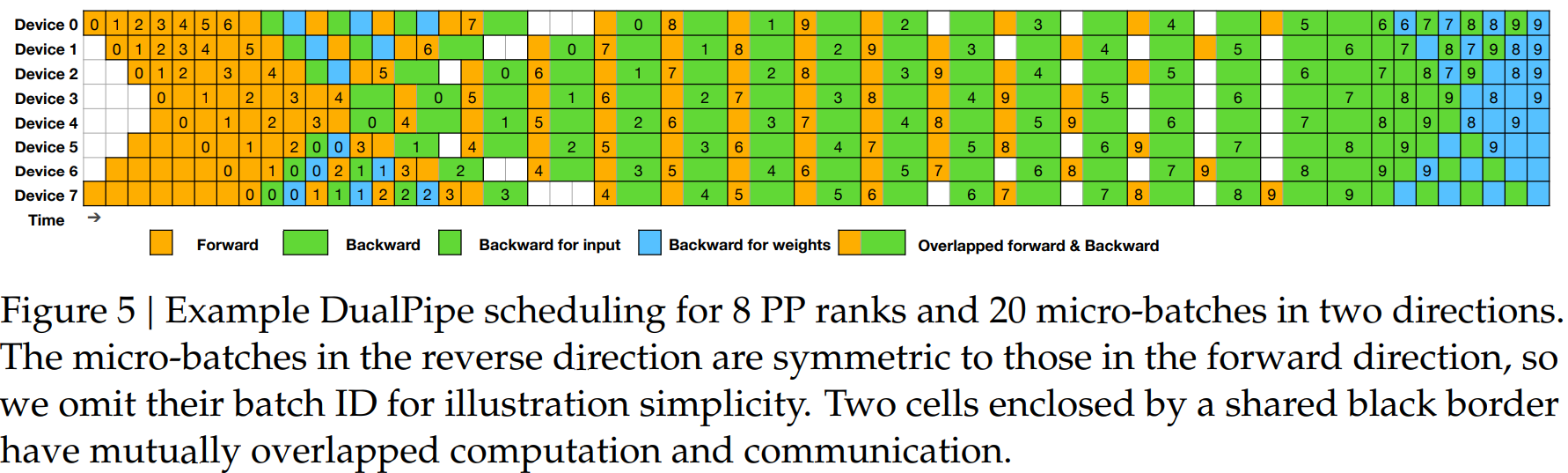
- 可以让 compute 和 communication 重叠,在整个双向管道都充满数据的情况下
-
MoE Expert Parallelism
-
Not Tensor Parallelism: 主要原因是 DeepSeek 没有 H100GPU 和 NVLink 的支持,Compute 能力和通信能力不足以支撑 TP
Inference Parallelism
Prefill
- Compute:
- Attention: TP4 + SP + DP8 9
TP4 是为了降低通信开销
- FFN: EP32 + TP
Dense MLP(浅层)部分:TP1(无张量并行)
- Attention: TP4 + SP + DP8 9
- Scheduler: 同时处理两个 micro-batch;
- 在一个 micro-batch 做 Attention + MoE 计算时,
- 另一个 micro-batch 正在进行 token 的 dispatch/combine(all-to-all 通信)。
- 用流水线(pipeline)方式在 micro-batch 级别做并行计算与通信重叠
Decode
-
Compute:
模块 并行策略 说明 Attention 部分 TP4 + SP + DP80 Tensor Parallel 4 路 + Sequence Parallel + Data Parallel 80 路 MoE 部分 EP320 Expert Parallel 320 路,每张 GPU 承载一个专家 每张 GPU 上只有 1 个专家;320 个专家覆盖所有 GPU;另有 64 张 GPU 专门放置冗余专家和共享专家。
-
Scheduler: 和 prefilling 阶段类似,他们尝试并行处理两个微批(micro-batch);在解码阶段,Attention 占用的计算时间更多;因此采用新的重叠方式:
阶段 micro-batch A micro-batch B 时间片 1 Attention Dispatch + MoE + Combine 时间片 2 Dispatch + MoE + Combine Attention
参考资料
[MegaScale-Infer: Serving Mixture-of-Experts at Scale
with Disaggregated Expert Parallelism](https://arxiv.org/pdf/2504.02263)